در گفتوگو با آنا بررسی شد؛
به گزارش خبرنگار علم و فناوری آنا، محققانی پیش از این، نرم رباتی ابداع کرده بودند که بدون کمک انسان یا رایانه قادر به حرکت در مسیرهای مارپیچ ساده بود؛ اما همین محققان اکنون یک نرم ربات بدون مغز ابداع کردهاند که قادر به مسیریابی در محیطهای پیچیدهتر و دینامیکتر است.
جی یین یکی از مؤلفان ارشد این پژوهش در دانشگاه ایالتی نورث کارولینا می گوید: در تحقیق پیشین ما نرم رباتی را نشان دادیم که می تواند از کنار موانع موجود در مسیرش بچرخد و به حرکت خودادامه دهد.
وی ادامه می دهد: اما این ربات نمی توانست بدون برخورد با مانع بچرخد. به طور عملی این بدان معنا است که ربات ممکن بود گیر بیفتد و بین موانع موازی عقب و جلو برود.
یین در ادامه افزود: اما اکنون یک نرم ربات جدید ابداع کردیم که می تواند مسیر خود را تغییر دهد و در نتیجه در مارپیچ های پرپیچ حرکت کند وحتی با وجود موانع متحرک در مسیرش، به راه خود ادامه دهد. همه این موارد با کمک هوشمندی فیزیکی و نه رایانه انجام شده است.
وی گفت: هوشمندی فیزیکی به اشیای دینامیک( مانند نرم ربات) اشاره دارد که رفتار آنها به وسیله طراحی ساختاری شان و همچنین مواد سازنده شان تعیین می شود و انسان یا رایانه در آن نقشی ندارند.
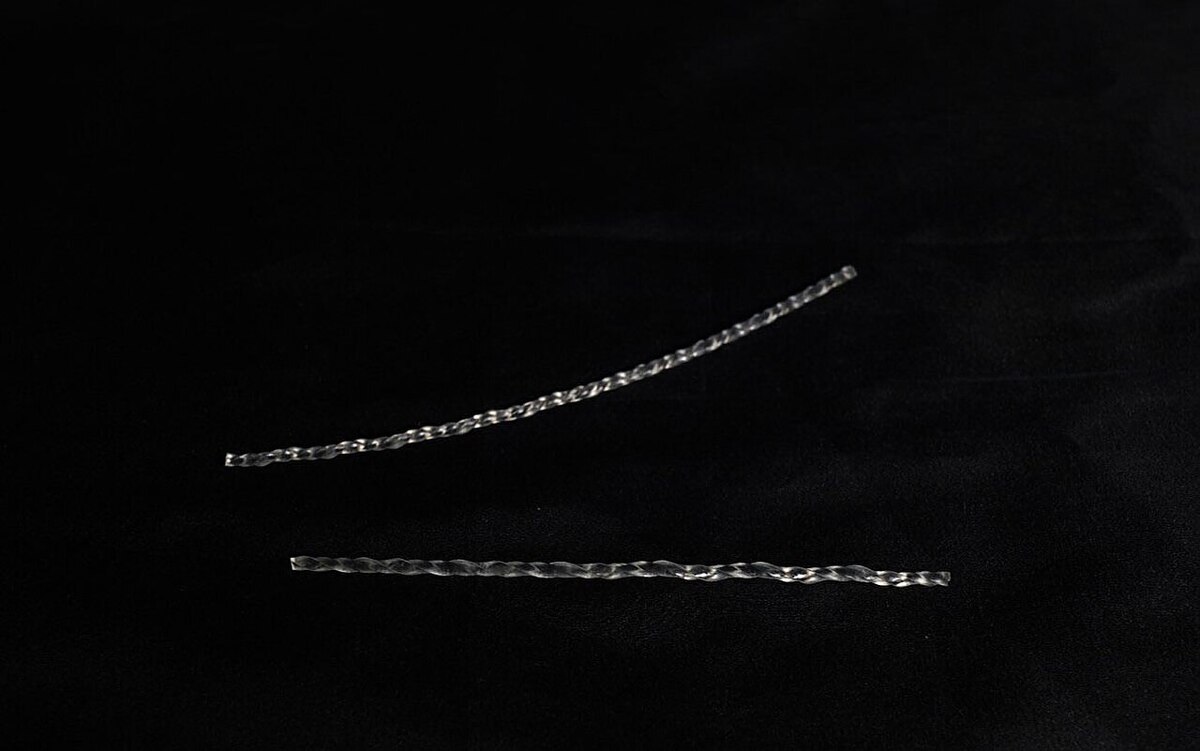
نرم ربات جدید مانند نسخه قبلی از الاستومرهای کریسیتالی مایع روبان مانند ساخته شده است. هنگامی که ربات روی سطحی با حداقل دمای ۵۵ درجه سانتیگراد قرار می گیرد که داغ تر از هوای موجود است، بخشی از ربات که روی سطح است، منقبض می شود و از سوی دیگر بخش دیگر که درمعرض هوا است، تغییری نمی کند.
این امر نوعی حالت غلتیدن را ایجاد می کند. هرچه سطح داغ تر باشد، ربات سریع تر می غلتد. نسخه های قبلی نرم ربات طراحی نامتقارن داشتند، اما نمونه جدید دو نیمه کاملا متمایز دارد.
نیمی از ربات مانند یک روبان پیچ وتاب خورده به شکل یک خط صاف است و نیم دیگر پیچ خوردگی بیشتری دارد که دور خود نیز می چرخد. این طراحی نامتقارن سبب می شود یک انتهای ربات بیش از دیگری، نیرو به زمین وارد کند. یک فنجان پلاستیکی را تصور کنید که دهانه آن عریض تر از قسمت پایه است. اگر آن روی میز غلتانده شود، به شکل یک خط مستقیم نمی غلتد؛ بلکه در مسیری انحنا دار روی میز حرکت میکند. دلیل این امر نیز شکل نامتقارن آن است.
يائو ژائو مولف ارشد تحقیق در دانشگاه نورث کارولینا می گوید: کانسپت ورای این ربات جدید بسیار ساده است. به دلیل طراحی نامتقارن بدون نیاز به تماس با آن، به راحتی می غلتد. بنابراین هنگامی که با شی برخورد می کند، مسی خود را تغییر می دهد و در نتیجه در مارپیچ ناوبری می کند و بین موانع موازی گیر نمی افتد. بلکه توانایی آن برای حرکت بین انحناها کمک می کند تا آزادانه حرکت کند.
انتهای پیام/